如上所述,在触头未斥开前,作用在动触头上的电动斥力包括触头间由于电流收缩产生霍姆力FH和导电回路产生的洛伦兹力FL。断路器导电回路上洛伦兹力FL一直存在至电弧熄灭,与电流的平方近似成正比关系。忽略涡流的影响,采用恒定场的方程来计算电流密度和磁通密度的分布,这样可以分三步来完成电动斥力的计算。图2-17 洛伦兹力计算流程图而对于低压断路器来说,动触头一般是在一个对转动轴的力矩M的作用下打开的,如图2-18所示。......
2025-09-29
在前文中已经提到,随着电流的增加,当电动斥力足以克服触头预压力时,动触头将被斥开一定角度,若此时操作机构动作不及时,还未带动动触头开始运动,触头将有可能由于霍尔姆力的消失和触头弹簧的作用下发生回落甚至重新闭合而造成熔焊。为了解决这一问题,卡住机构应运而生。
本节以额定电流为250A的旋转双断点塑壳断路器某一种卡住机构为研究对象,建立多体动力学模型,仿真分析了卡住机构的运动过程,并且进行了实验验证,最后分析了卡住机构的可靠性。

图2-36 触头卡住机构模型
触头卡住机构模型如图2-36所示,断路器触头系统的动触头通过可动轴和固定轴以及触头弹簧安装在主轴上;一组通过固定轴安装在主轴的支撑件,该组支撑件上具有月牙形轨道槽,可动轴安装在支撑件的月牙形轨道槽内,并可沿着月牙形轨道槽运动。
如图2-37所示,在电气线路中出现短路电流时,可使断路器的动触头在短路电流产生的电动斥力下迅速斥开,并卡住支撑件的月牙形轨道槽的末端,有效地防止了动触头跌落,提高了断路器的限流效果。

图2-37 动触头卡住前后对比
a)合闸状态 b)卡住状态
为了仿真验证断路器卡住机构的可行性,不考虑脱扣器的作用,当较大的短路电流到来时,动导电杆在电动斥力的作用下迅速斥开到卡住位置,并在卡住机构的作用下不会跌落。由于机构没有脱扣过程,所以动导电杆不能复位,始终处于卡住状态。
将短路电流(预期20kA)、霍姆力动态特性和洛伦兹力动态特性作为机构动力学仿真的输入,导入到ADAMS软件中,进行卡住机构运动过程的仿真分析,仿真结果如图2-38所示。
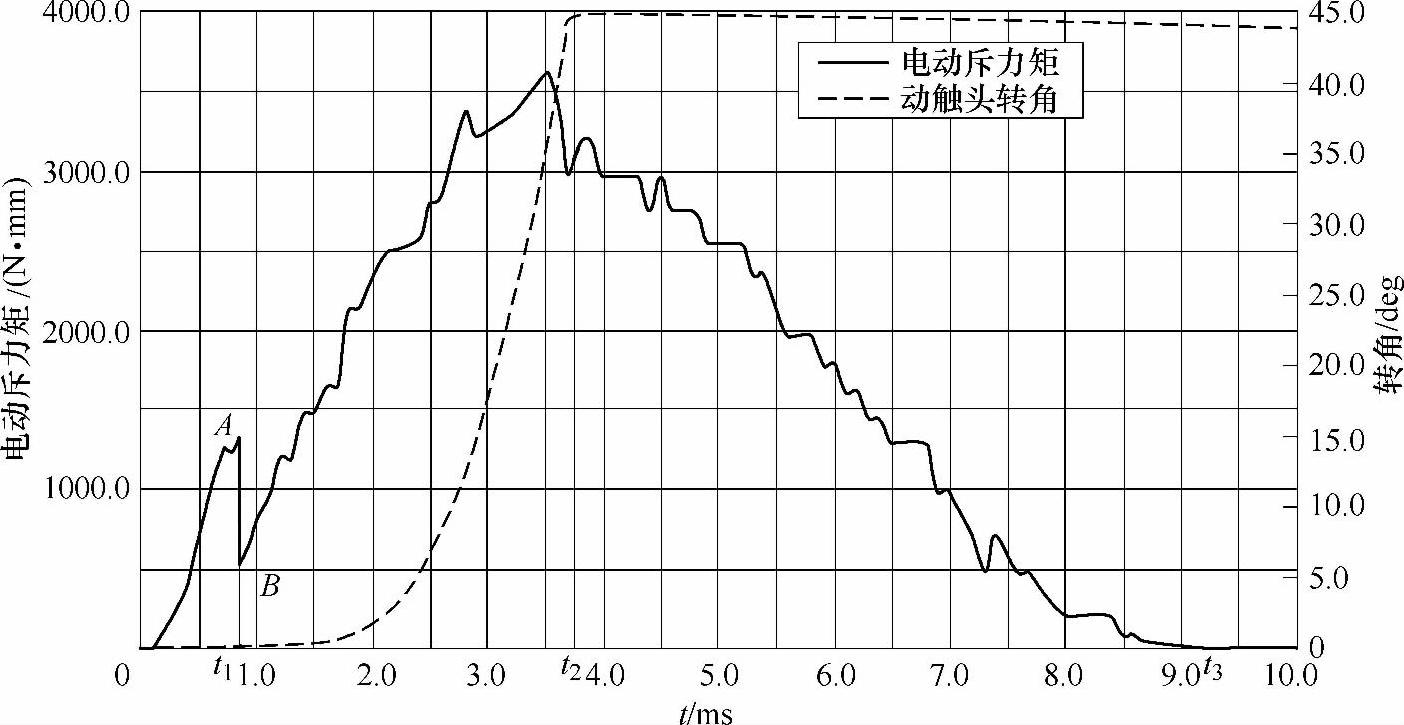
图2-38 卡住机构运动过程的仿真结果图
由图2-38中可以看出:
0-t1时间段中,触头压力不为0,动静触头依然接触没有分开,电动斥力为洛伦兹力和霍姆力之和,即F斥=FL+FH。
t1-t2时间段中,随着电流的增加,电动斥力足以克服触头预压力,触头压力为0,动静触头分开,霍姆力消失,即F斥=FL。t2时刻动触头被斥开至最大角度,由于卡住机构作用,动触头不会发生回落现象,此时动触头被斥开的开距为18mm。
t2-t3时间段中,随着电流的减小,电动斥力不断减小,直至t3时刻电动斥力减小至0,动触头在卡住机构的作用下基本保持开距为18mm,进而验证了卡住机构设计的合理性。
为了实验验证卡住机构的可行性,本节以未带脱扣器的250A旋转双断点MCCB为实验对象,对其开断过程进行了实验研究,并取预期短路电流为15kA和20kA,实验方法如2.3.1中所述。图2-39和图2-40为试验波形。

图2-39 预期短路电流15kA的电压电流波形

图2-40 预期短路电流20kA的电压电流波形
从实验波形看,两种预期短路电流下均没有发现电弧重燃现象,说明该样机卡住机构设计良好,没有回落现象,且能开断较高的额定电压。
塑壳断路器的卡住机构虽然解决了较大短路电流的动触头斥开后跌落现象,但是当短路电流较小时,动触头能够斥开但不能斥开到卡住位置,这时如果操作机构不能及时动作,动触头会发生跌落现象。即存在临界的电流,使得动导电杆处于是否卡住的临界状态。(https://www.chuimin.cn)
研究发现,在分断过程中,动导电杆被斥开后能否卡住不仅与电流的大小有关,还与燃弧时间有关。假设电弧电流波形是正弦波,只需确定其峰值Im和燃弧时间t燃,即可获得电弧电流波形,如图2-41a所示。将电弧电流的峰值Im和燃弧时间t燃设为变量,通过ADAMS软件进行分断仿真,可以得到如图2-41b所示的动触头最小卡住电流的曲线。

图2-41 电弧波形和最小卡住电流曲线
a)电弧电流波形 b)最小卡住电流曲线
仿真研究表明:
1)当电弧电流波形的峰值Im小于最小斥开电流(图中A点)时,由于电弧电流较小,产生的电动斥力不足以克服触头预压力而使触头打开,只有当机构的转角超过超行程以后,在机构的带动下,动导电杆才开始运动。
2)当电弧电流波形的峰值Im和燃弧时间t燃落在最小斥开电流和最小卡住电流曲线之间(图中B点)时,产生的电动斥力克服触头预压力而使触头打开,但是触头斥开后,电动斥力不足以克服触头弹簧反力的增加,动触头不能被斥开到卡住位置,这时如果机构不能及时动作,则斥开的动触头就会向静触头方向返回发生回落现象,造成电弧电压的降低,严重情况下会使动静触头重新闭合,甚至发生触头熔焊。这一现象会使分断过程延长,影响断路器的限流性能。
3)当电弧电流波形的峰值Im和燃弧时间t燃落在最小卡住电流曲线上方(图中C点)时,产生的电动斥力足以使动导电杆克服触头预压力和触头弹簧反力的增加而高速运动,最终动触头被斥开到卡住位置被锁住使之不能回落。
对于上述1),触头没有被斥开,分断能力取决于机构的动作速度,所以提高机构动作速度,有利于提高电弧电压上升速度,减小电弧停滞时间和加快电弧进入栅片,进而可以提高断路器的分断能力。
对于上述2),触头被斥开但存在回落现象,提高机构的动作速度,并与卡住机构合理配合,有利于减小触头回落的幅度,减小动触头跌落和熔焊的几率,提高断路器的限流性能和分断性能。
对于上述3),触头被斥开到卡住位置而被卡住,此时触头弹簧的拉力最大,随后在操作机构的带动下动触头到终端位置时,与设在动触头行程终端的复位止挡相碰,而使这种卡住机构复位。在复位的过程中,动触头在触头弹簧的作用下会回落,因此提高机构的动作速度,有利于减小复位过程中触头回落的幅度,减小电弧重燃的概率。
在上述仿真的基础上,加上电磁脱扣器的作用,即可进行断路器分断过程的仿真。图2-42和图2-43示出了20kA和150kA分断过程仿真结果。可以发现,卡住机构在复位过程中,如果主轴动作不及时,动触头可能会发生回落现象。
t1时刻:动触头刚刚被斥开。
t2时刻:动触头刚刚被斥开到卡住位置。
t3时刻:动触头行程终端的复位止挡相碰。
t4时刻:动触头开始回落。
t5时刻:动触头完全复位,之后与机构同步转动。

图2-42 20kA分断仿真结果

图2-43 150kA分断仿真结果
为了减小动触头回落带来的不利影响,设计复位止挡位置较高,即动触头与其相碰是开距为22mm。20kA分断过程动触头没有发生大的回落,是由于燃弧时间较长,触头受电动斥力作用时间较长。
相关文章

如上所述,在触头未斥开前,作用在动触头上的电动斥力包括触头间由于电流收缩产生霍姆力FH和导电回路产生的洛伦兹力FL。断路器导电回路上洛伦兹力FL一直存在至电弧熄灭,与电流的平方近似成正比关系。忽略涡流的影响,采用恒定场的方程来计算电流密度和磁通密度的分布,这样可以分三步来完成电动斥力的计算。图2-17 洛伦兹力计算流程图而对于低压断路器来说,动触头一般是在一个对转动轴的力矩M的作用下打开的,如图2-18所示。......
2025-09-29

首先取一额定电流为250A某型号低压限流式塑壳断路器为例来说明操作机构的工作原理,如图2-1所示。动触头转轴O上的扭簧约束了动导电杆和触头支架的相对运动。手动分闸时,分断弹簧随着手柄的转动被伸长贮能,当弹簧力的作用线与上连杆重合时,处于最大位能状态,一旦超过上连杆,B点向左运动脱离死区,触头支架被下连杆迅速上提,绕主轴O1转动,从而带动动导电杆和其上的动触头向上运动而分断。......
2025-09-29

了解了上述触头参数的定义和作用后,就可以利用ADAMS软件对这三个参数进行测量。在AD- AMS软件中,不需要移去静触头,只要移去动静触头之间的“接触”约束——CONTACT_1,就可以测量触头超程。在ADAMS软件中触头开距实际上就是动触头处于闭合位置和打开位置时两个位置之间的距离。图2-13 触头开距测量曲线......
2025-09-29

经调整后仍不能解决时,必须更换弹簧或触头。另外,用电设备及电路产生过电流的故障也会使触头过热,这就需要从用电设备及电路中找出故障原因并予以排除。产生的原因是高温使触头金属汽化和蒸发及机械撞击而造成。一般触头磨损到原厚度的2/3~1/2时就需要更换触头;若触头磨损太快时,应查清原因、排除故障。此时只能更换触头或更换容量大一些的电器。......
2025-09-29

智能产品设计包括形态设计、色彩计划设计、包装设计及与人类的交互设计等重要阶段。目前对于智能化产品设计的研究,主要停留在以用户的需求为基础,更加注重产品视觉上的界面形态设计研究,忽略了人机交互在其中的作用。因此本书更重点讲述产品交互设计的研究现状。国内的许多院校在研究领域多数还以计算机科学领域研究为主,产品交互设计在工业设计方面的研究才刚刚迈出第一步。......
2025-09-29

图4.15~图4.17分别列出了非空化工况、NPSHa=2.0m和NPSHa=1.8m的条件下,蜗壳内监测点V1~V13的压力脉动时域及频域图。蜗壳内压力脉动幅值最大处与非空化时一致,仍是蜗舌端部V2点在叶片通过频率fBPF处压力脉动幅值最大。表4.2蜗壳内压力脉动的最大幅值续表离心泵蜗壳内流动状况最复杂的部位是蜗舌附近。......
2025-09-29
图4.11~图4.13分别列出了非空化工况、NPSHa=1.05m和NPSHa=0.9m的条件下,蜗壳内监测点V1~V13的压力脉动时域及频域图。蜗壳内压力脉动幅值最大处仍在蜗舌附近扩散管上V1点。图4.14分别列出了监测点V8在非空化工况和NPSHa=1.05m时蜗壳横截面4个不同时刻的流线分布。......
2025-09-29
在分断过程中,触头的分断速度主要影响电弧电压上升速度,电弧停滞时间和电弧进入栅片的快慢。在对机构优化前,先来分析一些影响断路器操作机构分断速度的主要因素,例如:分断弹簧的刚度和杆件形状。增大主弹簧的刚度系数可以提高断路器的分断速度。可见,主弹簧刚度系数的提高能增大机构的开断速度,但同时增加了手动分合闸所需操作力,因而弹簧刚度的增加受到断路器手动操作力增大的约束。4)下连杆质心位置和质量影响最小。......
2025-09-29
相关推荐